Prajyot JadhavI’m a Research Engineer in Robotics at the Autonomous and Kooperative Systems Lab at the University of Tartu, Estonia, advised by Prof. Arun Kumar Singh. I’ve previously worked with JdeRobot through Google Summer of Code, collaborating with Prof. José María Cañas Plaza and Prof. Pedro Arias Pérez on the open-source software Robotics Academy. During my pre-final year summer, I worked on adaptive control strategies for quadrotors under the supervision of Prof. Poramate Manoonpong. I hold a Bachelor’s in Electronics and Communication Engineering from Visvesvaraya National Institute of Technology (VNIT), India. During my time there, I was part of IvLabs, the AI and Robotics lab of VNIT, where I developed many of my research interests under the guidance of Prof. Shital Chiddarwar. |

|
Research |
|
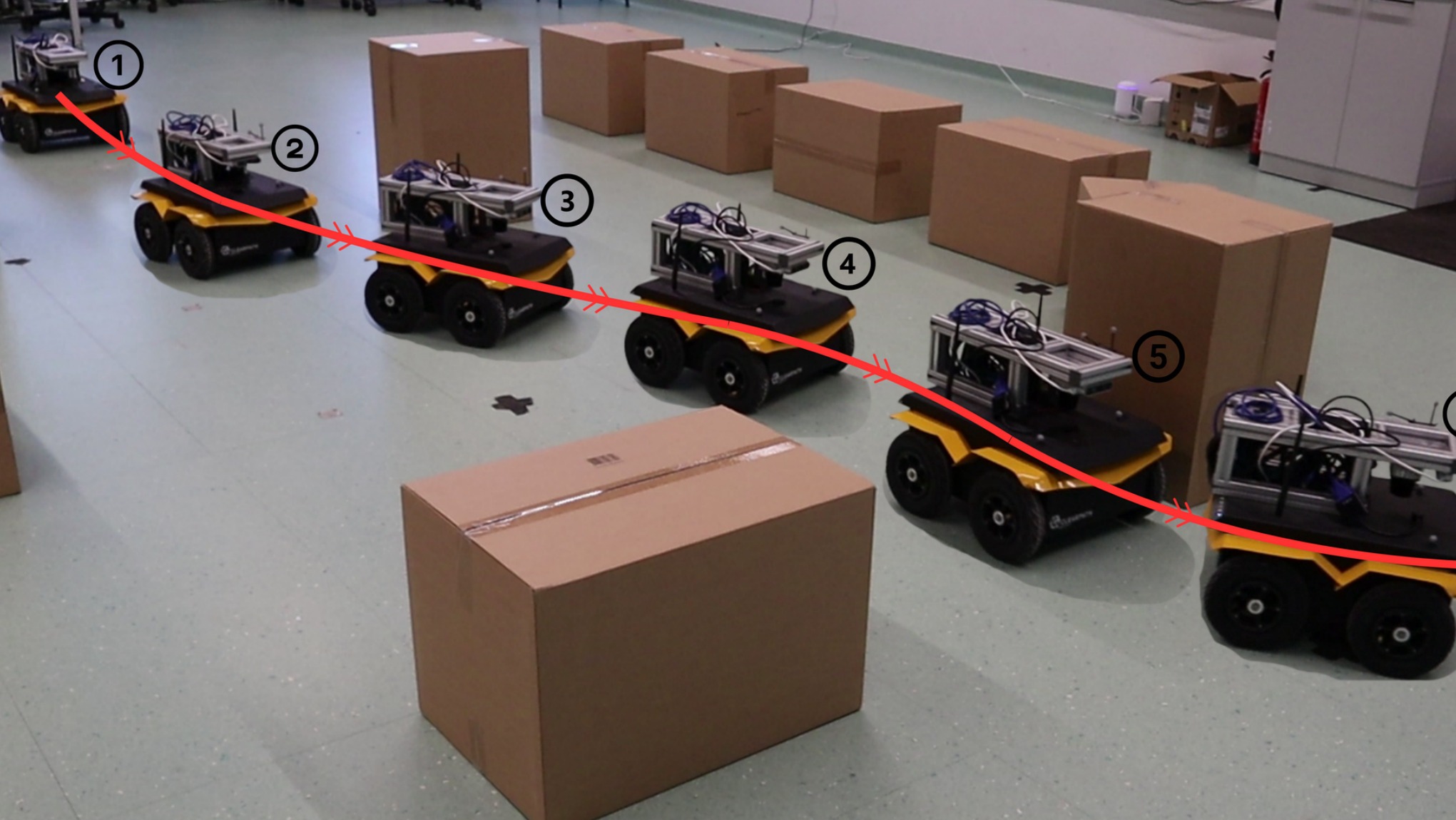
MonoMPC: Monocular Vision Based Navigation with Learned Collision Model and Risk-Aware Model Predictive ControlBasant Sharma, Prajyot Jadhav, Pranjal Paul, K. Madhava Krishna, Arun Kumar Singh Accepted at IEEE Robotics and Automation Letters (RA-L) and to be presented at International Conference on Robotics and Automation (ICRA), 2026 paper / code / website / |
|
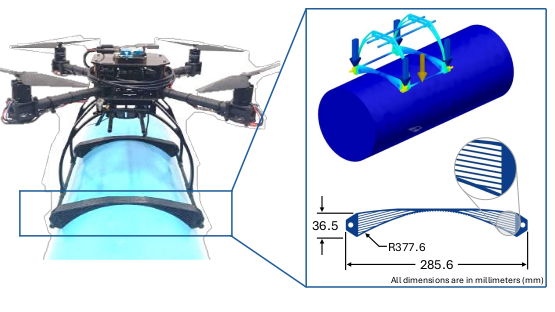
An Integrated Adaptive System for On-Pipe Landing and Adherence of Autonomous Inspection DronesV. Jaiton, P. D. Jadhav , K. Rothomphiwat, T. Phetpoon, K. Tarapongniwat, P. Manoonpong Accepted at IEEE/SICE International Symposium on System Integration (SII), 2025 paper / video / |

|
Autonomous Quadrotor Landing on a Moving PlatformPrajyot Jadhav , Poojan Gandhi, Anamika Singh B.Tech. thesis pdf / |
Selected Projects |
|
Optimization Methods for MPC-Based Mobile Robot Navigationcode / Sampling- and gradient-based optimizers (CEM, NLS, random search, and Nesterov’s accelerated gradient) within an MPC framework for real-time autonomous navigation. |
|
Control Barrier Function for safe Quadrotor Navigationcode / CBF-QP controller for quadrotor navigation that enforces safety constraints based on obstacle distance functions and solves the QP in real time for reliable collision avoidance. |
|
|
|
Website template from Jon Barron | Last updated: 07-03-2026 |